Stort intresse för ESR:s Teknikseminarier på Bolmen Fieldday 2004
Bolmen 2004 är över! Idel glada miner trots en del regn. Minst lika många besökare som förra året!
ESR bidrog i år med teknikseminarier och workshop.
Interaktivt DX-Cluster
ESR DX-Cluster på WAP som presenterades i slutet av februari blev snabbt populärt. Richard SM7OHB berättade om ännu ett ESR-projekt - interaktivt webbaserat DX-Cluster. -Som användare skall du kunna lägga upp egna användarprofiler, där du själv bestämmer vilken information som skall visas och hur den skall presenteras på webben säger Richard. Du väljer fritt kombinationer av frekvensband och mode, t ex väljer du 3.5 och 7 MHz CW samt 7,14 och 28 SSB. Eller vill du hårdbevaka några av SHF-banden. Andra finesser är automatisk länkning till QSL-information och DX-bulletiner, undertryckning av "chat-meddelanden" propagation larm, e-post meddelande eller SMS när de stationer du skrivit in på din bevakningslista kommer upp eller när SFI och K-index passerar de gränser du ställt in.

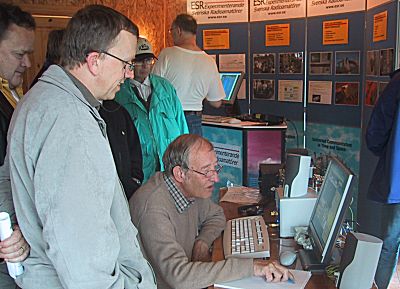
Richard SM7OHB visar här Kjell SM7GVF en del av finesserna i ESR:s DX-Cluster.
Du som är medlem i ESR och vill vara med och påverka utformningen av ESR DX-Cluster och ESR WAP kan göra detta genom att anmäla dig som deltagare i referensgruppen. För ändamålet har vi satt upp en temporär e-postlista där du kan registrera dig. e-postlistan fungerar som en vanlig mailreflektor där du kan ställa frågor, diskutera med de andra deltagarna, ge synpunkter och komma med egna ideér och förslag till förbättringar. Implementering av mer avancerade finesser kommer att ske i nästa version av DXC och som bygger på en databas med betydligt fler möjligheter än nuvarande testplattform.
Mer info på medlemsavdelningen
Demo av SDR-1000 från FlexRadio Systems
Software Defined Radio - SDR, d v s mjukvarudefinierad radio, är en radioarkitektur där signalbehandlingen i huvudsak sker digitalt med speciella dataprogram. Transceivern SDR-1000 från FlexRadio i kombination med en PC fungerar dels som en högvärdig radiomottagare för frekvensområdet 0-65 MHz och dels som en sändare för alla amatörradioband mellan 160 och 6 meter med en uteffekt av 2 watt PEP. Såväl hårdvaran som dataprogrammen för SDR-1000 är utvecklade av radioamatörer.
Willi, SM6OMH är medlem i Föreningen Falkenbergs Sändaramatörer, bygger sin utrustning själv och är aktiv på kortvågsbanden. -Jag läste om projektet SDR-1000 i februarinumret 2003 av QTC, hämtade mer information på Internet och bestämde mig direkt för att beställa ett exemplar säger Willi. Det kunde kanske vara ett sätt att skaffa sig en modern transceiver, utan att behöva avstå från hembyggandet och experimenterandet.
På Radioträff Syd RS-04 blir det en uppföljning av Willis demonstration.
Presentation av en enkel mottagarutrustning för "chirpsounders"
Den utsända radiosignalen, vanligtvis 10-50 W uteffekt kan beskrivas som ett kontinuerligt 100 kHz/s frekvenssvep (s k chirp) från 2 till 30 MHz. Det finns många militära och kommersiella sändare som vi radioamatörer kan använda att åka "snålskjuts" på. Förutsättningen för att kunna ha nytta av dom är givetvis att deras geografiska position är känd och att vi också känner till sändningsschemat och starttiden när frekvenssvepen börjar. Här i Sverige finns sådana sändare i Boden och Visby.

ESR:s prototypmottagare bestående av nätdel, DDS-oscillator, PC-interface, GPS-styrd tidsnormal och mottagarkonverter. Janne SM7ETW har under våren finputsat systemet som nu ger mycket fina bilder från de chirpsändare som regelbundet monitoreras. Nästa fas i projeketet blir att ta fram mönsterkort och lägga ut schema och all dokumentation på webben så att fler kan bygga.

Janne SM7ETW hade en hektisk lördag med non-stop demo från kl 09-17. Besökarna avlöste varandra på löpande band och tidvis var det trångt. -Många av de nya radioamatörerna visade stort intresse för projeketet och det är ju en trevlig kombination om man förutom radio också är intresserad av programmering och digitalteknik säger Janne.
Hur fungerar chirpsounding?
Delsammanfattning av "Automatic Propagation Monitoring Project, (APMP)"
Principer för jonosfärsondering och beskrivning av ett enkelt mottagningssystem för automatisk vågutbredningsmonitorering av kommersiella och militära jonosounders i frekvensområdet 2-30 MHz samt databehandling och presentation av av datan i nära realtid.
Projektet bedrivs inom SIG1 som är en Special Interest Group i Föreningen Experimenterande Svenska Radioamatörer. Automatic Propagation Monitoring Project (APMP) Projektdeltagare: Richard Niklasson SM7OHB programmering, Kent Hansson SM7MMJ GPS-system, Bengt Falkenberg SM7EQL HF-delar och antenner, Jan-Olof Bergstén SM7ETW digitalteknik och programmering samt Krister Ståhl SM7LXC webbgrafik och CAD.
Inledning
Jonosonden uppfanns redan 1926. På 1950- och 60-talen fanns c:a 200 jonosonder i kontinuerlig drift utspridda över hela världen. Baserat på observationer från dessa utarbetades radioprognoser för att bestämma lämpliga frekvenser för radiokommunikation. Två huvudtyper av jonosonder kan särskiljas, nämligen system för vertikal sondering och för s k snedsondering.
Vertikal sondering används primärt i forskningssyften för att undersöka jonosfärens egenskaper. Det finns flera olika system med olika egenskaper. Sändare och mottagare är oftast samlokaliserade d v s belägna mycket nära varandra.
Snedsondering används i huvudsak av kommersiella och militära radioanvändare för monitorering av "radio-kanalen" mellan två avlägsna platser. Resultatet från snedsonderingen bildar underlag för radioprognoser och utgör indata för ALE-baserad radioutrustning. Sändare och mottagare kan vara belägna inom landet, i olika länder eller världsdelar. ESR:s APMP bygger på att lyssna och analysera signalerna främst från denna typ av sändare, avsedda för snedsondering.
Vertikal jonosondering - allmänna grundprinciper
Jonosonden i är i grunden en sorts HF-radar. Korta pulståg sänds i det närmaste rakt upp mot jonosfären. Sändareffekten kan variera från kanske 50 W upp till 10 kW eller mer, allt beroende på utrustning och vilket syfte sonderingen har. Signalerna reflekteras från höjden h och vid mottagaren mäts tidsskillnaden, Dt, mellan referenssignalen från sändaren och den reflekterade signalen via jonosfären.
Om vi antar att signalen fortplantar sig med ljushastigheten c, och sändare och mottagare är placerade på samma plats (eller mycket nära varandra < 1 km) fås skikthöjden h ur formeln; h = 0.5 c Dt
Figur: Schematisk beskrivning av principen för jonosfärsondering med presentation av resultatet på oscillografrör och som användes fram till att datorerna tog över på 70-talet.
Jonosonden mäter skikthöjden h vid olika frekvenser, vanligen mellan 2-30 MHz. Med ökad frekvens ökar inträngningsdhjupet i jonosfärskiktet innan signalen åter reflekteras mot marken. Den frekvens som helt tränger igenom jonosfärens E-skikt kallas den kritiska frekvensen och benämns f0E. Motsvarande kallas den kritiska frekvensen som tränger igenom F-skiktet för f0F.
Resultatet från jonosondmätningar presenteras vanligtvis som s k jonogram där skikthöjden h, visas som funktion av frekvensen.
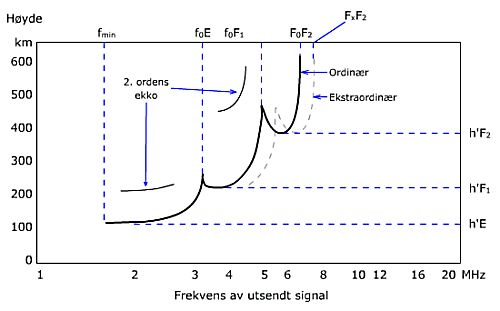
Figur: Visar vad som kan utläsas ur ett jonogram från vertikal sondering.
Av figuren ovan framgår att för frekvenser upp till strax över 3 MHz reflekteras signalen på drygt 100 km höjd. Vid c:a 3.2 MHz bryter signalen igenom E-skiktet (f0E). Från 3.2 MHz upp till c:a 5 MHz får vi ett eko från omkring 200 km höjd, d v s från F1-skiktet. Vid c:a 5 MHz och vid höjden c:a 250 km bryter signalen igenom delar av F-skiktet. Vi får ett nytt eko upp till c:a 7.5 MHz från 400 km höjd. Vid frekvenser över 7.5 MHz erhålls inga reflektioner. Dessa signaler försvinner ut i rymden.
Skikthöjderna h läses av vid de lägsta punkterna på respektive ekokurva, d v s innan den böjer av starkt uppåt. Ibland reflekteras signalerna en eller flera gånger mellan jonosfären och markytan. Dessa registreras som 2:a eller högre ordningens eko i jonogrammet. Sådana ekon syns i figuren ovan som korta streck på dubbla höjden av 1:a ordningens eko.
Ibland kan det komma eko i samma höjd som E-skiktet (mellan (100-150 km), men vid frekvenser mycket högre än f0E, helt upp till 30 MHz. Sådana eko kommer från s k sporadiska E-skikt (Es) som uppstår under speciella förhållanden på just dessa höjder.
Vertikal jonosfärsondering sker numera även ifrån satelliter (top side sounding) för att undersöka skikten från ovansidan. Sådana mätningar har gett många nya forskningsresultat i höjdområdet över 400 km.
Snedsondering (eng; Oblique sounding)
Grundprinciperna för vertikal sondering gäller även för snedsondering. Geometrin för snedsondering gör emellertid analysen av resultatet mer komplicerad. Anledningen är att radiosignalen i sned vinkel snarare avböjs än reflekteras och därför är mycket känsligare för horisontella gradienter och variationer i jonosfären. Situationen blir än mer komplicerad av det faktum att radiosignalen från en sändare kan nå mottagaren via flera utbredningsvägar, (s k flervägsutbredning) och som var och en tillför olika typer av fas- och amplituddistortion och refraktionsförluster.
Figur: Geometrin för snedsondering med ett hopp. Höjden h betecknar virtuell höjd för en tänkt geometrisk reflektionspunkt. Den heldragna kurvan visar hur signalen i praktiken böjs av i skiktet.
Trots den ökade komplexiteten med snedsondering erbjuder metoden stora fördelar jämfört med vertikal sondering, för att förklara och beskriva radioutbredningen mellan två punkter. Först och främst för att tekniken möjliggör att i nära realtid monitorera jonosfärens egenskaper både på otillgängliga platser och över långa avstånd. En annan fördel är att en (1) mottagarstation kan monitorera flera sändare och på så sätt samla in information mellan olika platser och kontinenter. Omvänt kan en sändare givetvis monitoreras av flera mottagare.
Snedsondering där resultatet presenteras som högupplösta jonogram ger viktig information om de frekvensband som lämpar sig bäst för kommunikation mellan utvalda platser. Systemet används för kommersiell- och militär radiokommunikation.
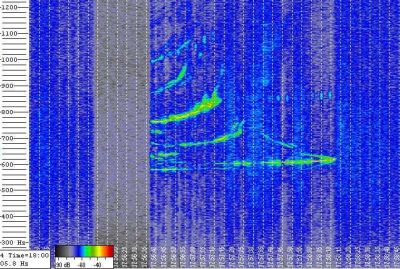
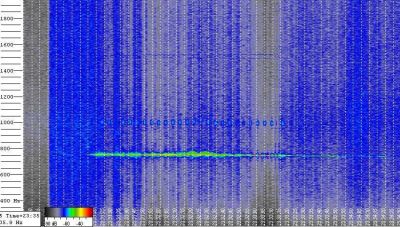
Bilden visar ett jonogram för sträckan Boden - Eksjö mottagen med ESR:s mottagningsutrustning. Den vertikala axeln representerar löptiden och den horisontella axeln frekvensen 2-30 MHz. Den nedersta kurvan visar första hoppet upp till c:a 14 MHz (500 KHz per linje med början vid 2 MHz). Kurvan ovanför visar 2-hoppsutbredning upp till c:a 8.5 MHz. Den kraftiga kurvan i mitten är 3-hoppsutbredning och når upp till c:a 6 MHz. Slutligen ses 4:e och 5:e hoppet som slutar vid c:a 4 MHz.
Av diagrammet ovan kan utläsas att radiotrafik mellan Boden och Eksjö och vid en aktuella tidpunkten är möjlig från 2 MHz upp till 20 MHz. Bäst signalsyrka kan förväntas strax under 20 MHz om stationerna har tillgång till antenner med låg stråningsvinkel, och mellan 2-6 MHz om antenner med hög strålningsvinkel används.
Ett diagram som detta visar klart och tydligt vilka frekvenser som är lämpligast för radiokommunikation för en vii sträcka vid en vii tidpunkt. Det framgår också att det inte är möjligt att få förbindelse mellan 20-30 MHz. Dock skall man komma ihåg att förhållandena i jonosfären ändra sig mycket snabbt.
Hur fungerar sändare- och mottagareutrustningen för snedsondering?
Den utsända radiosignalen, vanligtvis 10-50 W uteffekt kan beskrivas som ett kontinuerligt 100 kHz/s frekvenssvep (s k chirp) från 2 till 30 MHz. Mottagaren har en prestanda som en ordinär kortvågsmottagare för amatörradio eller kommersiellt bruk.
Det finns många militära och kommersiella sändare avsedda för snedsondering som vi radioamatörer kan använda att åka "snålskjuts" på. Förutsättningen för att kunna ha nytta av dom är dock att deras geografiska position är känd och att vi känner till sändningsschemat och starttiden när frekvenssvepen börjar. Här i Sverige finns sådana sändare i Boden och Visby.
Presentation av prototypmottagaren i ESR:s projekt APMP
Antennsignalen 2-29.9 MHz blandas till en fast mellanfrekvens (MF) 30 MHz. Blocket "CW RX" utgörs i prototypapparaten av en ordinär ICOM IC706 mottagare som är fast inställd på 29.95 MHz. LF-signalen matar ljudkortet i en PC (ner till höger i bild) där all signalbegandling sker. GPS-mottagaren styr en 10 MHz frekvensstandard som används för att faslåsa 100 MHz referensklockan i DDS-oscillatorn. 1 PPS pulsen från GPS-mottagren används för att tidssynkronisera PC internklocka och starta frekvenssvepet.
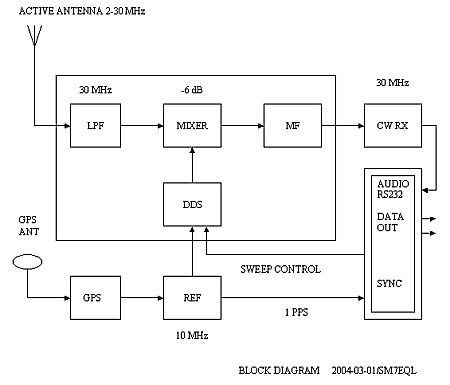
Figur: Principschema över prototypmottagaren.
Ingångskretsar och HF-del
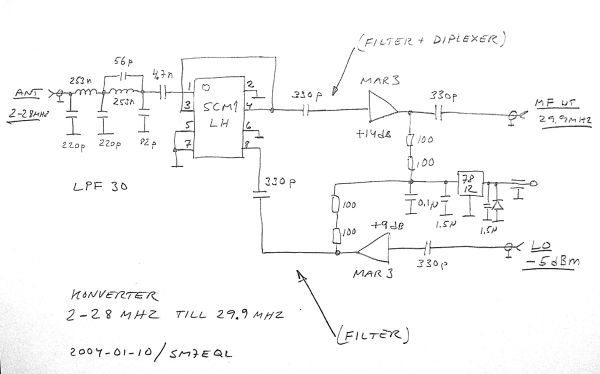
HF-delen i "chirpmottagaren" består i all sin enkelhet av en konverter med några få komponenter och som täcker området 2-30 MHz och med MF 29.9 MHz. Som MF används mottagaren i en vanlig amatörradiotranceiver och som är kopplad till en PC med fft-analysprogram (vattenfall typ de program som används för PSK31 etc).
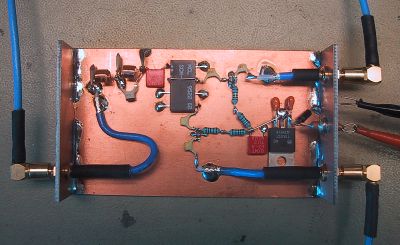
Antennsignalen (vänster SMB-kontakt) passerar ett 5-poligt lågpassfilter med fc 29 MHz. Lokaloscillatorsignalen nominellt -5 dBm (från DDS VFO:n i nedre högra SMB-kontakt) förstärks i en MAR3 till c:a + 9 dBm. Som blandare används en +10 dBm SCM1LH från Mini Circuits. Mellanfrekvenssignalen nominellt 29.9 MHz centerfrekvens förstärks c:a 14 dB i en MAR3 och finns i övre högra SMB-kontakt. Conversion gain är uppmätt till 7 dB.
En 7812 spänningsstabilisator används för att ge +12V internspänning till de båda MAR3 som är biaserade för 35 mA. En 1004 används som skydd mot felpolning av matningsspänningen.
Denna enkla konvertern var enbart avsedd som ett temporärt hjälpmedel för att avprova DDS-svepet och köra igång systemet. Därför hade ingen större möda lagts ner på vässade och optimerade filter etc.
En "modern" mottagarkonverter kräver betydligt bättre ingångsfilter, t ex i form av halvoktaviga bandpassfilter eller liknande. Det krävs också viss filtrering av LO-signalen samt filter eller diplexer på mellanfrekvensen.
Rent mottagarkänslighetsmässigt kan dock denna enkla konverter ta emot precis lika svaga signaler som vilken kommersiell mottagare som helst, ner till ungefär c:a - 140 dBm. Svagheten i konvertern är dålig IM2 och spegelfrekvensdämpning.
Som synes så är den enkla konstruktion inte på något sätt optimerad. För bättre prestanda måste LO-signalen filtreras ordentligt så att dess övertoner och utombandsspurioser inte når blandaren. Ett LPF eller BPF kan läggas in mellan MAR3 utgång och pin 8 på SCM1LH. MAR3 är lite underdimensionerad i denna koppling och anledningen till den låga förstärkningen 9 dB är att kretsens 1 dB kompressionspunkt helt enkelt är för låg. Om bästa möjliga egenskaper önskas måste anpassningen på pin 8 hållas på 50 ohm resistivt över alla frekvenser. Normalt brukar man lösa detta genom antingen införa 3...6 dB pad. Nackdelen är att det då krävs motsvarande högre LO-injektion. Ett bättre sätt är att använda en diplexer.
Sak samma gäller för MF utgången från blandaren (pin 4) Bästa lösningen är en diplexer så att alla frekvenser termineras i 50 ohm resistivt. Det finns inga genvägar om man vill ha ut maximal prestanda ur en blandare.
Även RF-ingången bör känna 50 ohm och även här gäller diplexer, 3 dB pad och/eller i kombination med en pre-amp med bra storsignalegenskaper.
DDS (Direkt Digital Syntes) - lokaloscillatorsignal
För att generera mottagarens lokaloscillatorsignal används en oscillator baserad på DDS kretsen AD9858 från Analog Devices. Kretsen innehåller allt som behövs för att skapa en analog signal upp till c:a 50 MHz. Frekvensinställningen kan genom digital kodning göras i steg ner till 0.01 Hz vilket är mycket mer än vad som behövs i en applikation som denna. AD9858 har lågt fasbrus men tyvärr ganska dålig undertryckning av spurioser. I mer avancerade mottagare låter man därför DDS-oscillatorn styra en lågbrusig VCO vilken faslåses till DDS-oscillatorn.
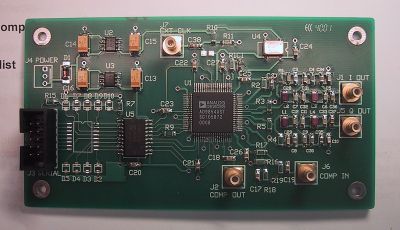
Richard Hoskins VK6BRO har tagit fram en generell DDS-konstruktion som passar bra i den chirpmottagare som vi tagit fram. Konstruktionen bygger på AD9854 från Analog Devices.
DDS ger hög frekvensnoggrannhet
Fördelen med DDS-oscillatorn är att frekvensen hos utsignalen blir lika noggrann som referensoscillatorn. I prototopen används en temperaturkompenserad 100 MHz kristalloscillator (TCXO) med en noggranhet av 1/10 ppm. För att ytterligare förbättra frekvensnoggrannheten är det möjligt att faslåsa DDS-oscillatorn till en mer noggrann 10 MHz referenssignal. Denna kan skapas med hjälp av signaler från GPS-mottagaren ovan.
DDS-kretsens frekvenssvep styrs digitalt från seriekanalen i en PC. Den höga frekvensupplösningen 0.01 Hz möjliggör extremst snabba och mycket exakta förändringar av frekvensen.
GPS (Global Positioning System)
GPS består av 24 satelliter i omloppsbana på 20000 Km höjd över jordytan. Systemet drivs och kontrolleras av USA:s Försvarsdepartement sedan 70 talet. Numera har dock civila organisationer fått stort inflytande eftersom den civila användningen ökat. Den höga omloppsbanan och vinkeln mot ekvatorn (inklinationen) gör att man från varje plats på jorden alltid kan ta emot signaler från minst fyra satelliter över horisonten. Omloppstiden för varje satellit är ca 12 timmar.
Namnet antyder att systemet primärt är avsett för navigering och positionering. Systemet ger dessutom möjlighet för noggranna tids- och frekvensmätningar. Varje satellit har fyra inbyggda atomur, två cesium och två rubidiumur där varje enskilt ur är noggrant synkroniserat mot UTC (Universal Time Coordinated). Tidsskalan som används kallas för GPS-tid, det är en kombination eller medelvärde av varje satellits egen klocka och ett antal klockor på jorden bland annat UTC. GPS tid är dock till skillnad från UTC en kontinuerlig tidsskala. Därför skiljer sig GPS-tid från UTC förutom små variationer genom att man i GPS tid inte lägger till s.k. skottsekunder.
Satelliterna sänder på två olika frekvenser benämnda L1 och L2. Signalerna är modulerade med två olika unika koder för varje satellit, för att mottagaren skall kunna särskilja signalerna från de olika satelliterna. Den ena koden den s.k. P-koden är krypterad och används av militären, den andra C/A koden är öppen och sänds bara på frekvens L1 och kan användas av alla. Båda bärvågorna är dessutom modulerade med ett navigationsmeddelande som innehåller information om var satelliterna befinner sig när de sänder ut en speciell del av koden, satellitklockornas tid relativt UTC m m. Eftersom C/A koden bara sänds på en frekvens så kan man inte korrigera för fördröjningar i atmosfären vilket gör att det endast är militären som kan använda GPS systemet med extremt god noggrannhet utan att använda markbundna referensstationer s.k. DGPS differentiell GPS.
I C/A koden finns möjlighet att införa ytterligare onoggrannhet eller missvisning, detta kallas SA eller Selective Availability. Fram till maj år 2000 var SA påslagen i GPS systemet vilket gjorde att man med kommersiella mottagare inte kunde få bättre noggrannhet än ca +- 100 m utan SA blir precisionen ca +-10 m.
Egentligen behövs bara signal från en satellit för att kunna göra tids- och frekvensmätningar, men med flera satelliter kan noggrannheten ökas genom att bilda medelvärden från flera satelliter. Man kan i princip få en tid relativt UTC med en noggrannhet på några hundra nanosekunder om man mäter under flera timmar. Med längre mättid och olika mätmetoder kan man få ännu högre precision, upp till 10E-10 och 10E-15.
1 PPS standard
I detta projektet har vi valt att använda en GPS mottagare Lassen LP från Trimble, anledningen är bland annat att den finns tillgänglig på surplusmarknaden och att den är enkel att använda och konfigurera.

Prototyp till 1 PPS standard För tidssynkroniseringen av chirpmottagarens frekvenssvep behövs följande signaler och information från GPS-mottagaren: Tid i form av NMEA meddelanden, 1PPS (1 Pulse Per Second), och en 10MHz referensoscillator låst till 1PPS. GPS-mottagare är en Lassen LP. Mottagaren lämnar meddelandena GPGGA samt GPGLL där det senare innehåller tiden ner till 1/10 sek.
Tekniska data Lassen GP
- Drivspänning 3.3 V
- Effektförbrukning 180 mW
- Drivspänning till antenn, 3.3 Volt
- TSIP, TAIP och NMEA 0183 protokoll på serieport 1
- RTCM SC-104 ingång för DGPS på serieport 2
- 1PPS puls för synkronisering
För att konfigurera mottagaren och för att mottagaren skall kunna skicka tidsmeddelanden till datorn behövs ett programmeringsinterface. De två serieportarna på GPS-modulen ger CMOS/TTL nivåer ut och kan därför inte anslutas direkt till serieporten på datorn. För att klara detta har ett interface med en standardkrets från Maxim (MAX232) tagits fram. Eftersom Maxim-kretsen drivs med 5 V och GPS mottagaren med 3.3 V så används en 7805 stabilisator för 5V, och göra 3.3V (3.6V) fås genom att seriekoppla två dioder. Lassen LP lämnar en mycket kort negativ puls, (1 PPS-puls) som inverteras och förlängs innan den omvandlas till RS-232 nivå för anslutning till CTS pinnen till datorn.
Tidssynkronisering mellan sändare och mottagare viktig
GPS-systemet används för att tidssynkronisera sändarens frekvenssvep med mottagaren. Detta medger exakt mätning av löptiden eller den tid det tar för radiosignalen att nå fram till mottagaren. Svephastigheten 100 kHz/s motsvarar en teoretisk avståndsupplösning av 10 mS eller 1.5 km.
Chirpsändarna i Boden och Visby startar sitt frekvenssvep på 2 MHz var 15:e minut, dygnet runt. Ett komplett svep upp till 28 MHz tar 280 sekunder. Genom att synkronisera ESR:s chirpmottagare i tid och frekvens kan både den mottagna signalens styrka och relativa frekvens (dopplerskiftet) registreras. Just dopplerskiftet är intressant eftersom det är är kopplat till signalens löptid och som påverkas av skikthöjden. Genom bearbetning av signalen i ett FFT-program (vattenfallsprogram) presenteras resultatet som skikthöjden på den vertikala axeln och sändningsfrekvensen på den horisontella axeln.
Vad kan man utläsa ur jonogrammet?
Radioenergi utbreder sig genom olika moder (t ex ett hopp. två hopp, E-skiktet F-skiktet etc) som har överföringsfördröjning, karakteristik och andra igenkänningsmärken. Signalen från chirpsändaren tas följaktligen emot som flera olika signaler med olika frekvens och fördröjningar.
Dessa signaler processas av mottagaren och PC-n och visas grafiskt som en funktion av sondens svepfrekvens, med värden för signalens löptid på den vertikala axeln och för mottagningsfrekvens på den horisontella axeln. Det resulterande diagrammet benämns jonogram.
Diagrammet ger information om vilka frekvenser som vid en viss tidpunkt kan reflekteras via jonosfärskikten och som därför är användba för radiosamband. Mätningen Boden - Eksjö gäller naturligtvis enbart denna sträcka, men kan ändå ge en fingervisning om möjligheterna för kommunikation t ex inom Sverige.
Presentation av den mottagna signalen med hjälp av fft "vattenfall"
På grafen nedan visas frekvensen i MHz längs den horisontella axeln och höjden där signalen reflekteras i km, längs den vertikala axeln.
foF2 kan läsas ut från jonogrammet. Denna frekvens är den högsta som reflekteras vid vertikalt infall och vid jonosfärförbindelser över mycket korta avstånd (NVIS).
Om man önskar förbindelse över längre avstånd, kan högre frekvenser än foF2 användas. Högsta användbara frekvens vid förbindelse över 3000 km betecknas i ionogrammet som MUF (Maximum Usable Frequency). Vid kortare avstånd än 3000 km ligger MUF för det aktuella förbindelseavståndet mellan foF2 och MUF(3000) som det presenteras här i exemplet.